The goal of this lab is to classify preprocessed Lidar points into ground and water points. This is achieved by using automatic ground filtering algorithms and identifying low outlier points, manual cleanup, and the classification of water points using breaklines.
Methods
To begin this lab LAS tiles of Lake County Illinois were brought into LP360 in 64-bits. Then a NAIP image with was also brought into the image to aid in image classification. Once the image was brought into LP360 the image was then displayed according to classification, elevation, and return combination. When the image was displayed by classification, it was evident that the data was clearly not classified (figure 1.). Also, when the data was displayed by return combination the image was dominated by single returns and high the highest amount of clustering was found in forested areas.
 |
| Figure 1. Dataset containing only unclassified points |
When analyzing a LIDAR dataset, it is vital for the data’s statistics to be checked. For this lab the LAS file statistics were extracted via making the dataset into shaplefile where the statistics could be view Arcmap.
Following the extraction of the LAS statistics, low outlier points were removed from the data. This was completed using the Low/Isolated Points Filter.
Once this was completed, an Adaptive Tin Ground Filter was applied to the data. The Adaptive Ground Tin Filter selects the lowest point in each of the tiles and then assigns this point as a seed point. Once the each of the tiles has a seed point, the model then generates a tin model from the seed points through a series of iterations, for this lab 8 iterations were used. If a point a falls within the threshold parameters, the point is then classified as a ground point. Also, for this lab all the flags were ignored.
This was done in two iterations, after the first iteration was complete. The seed points for each of the tiles were checked to ensure that all the seed points were correctly classified as ground points. Once the ground points were verified, the Adaptive Tin Ground Filter was then run again on the data.
The next section of the lab was to visually inspect the data and manually correct areas that were wrongly classified. This was both for buildings that were wrongly classified as ground points as well as ground points that were left unclassified. This was done by using the Ground Cleanup Filter. This was done by using both the profile and 3D viewer to flag points that were misclassified.
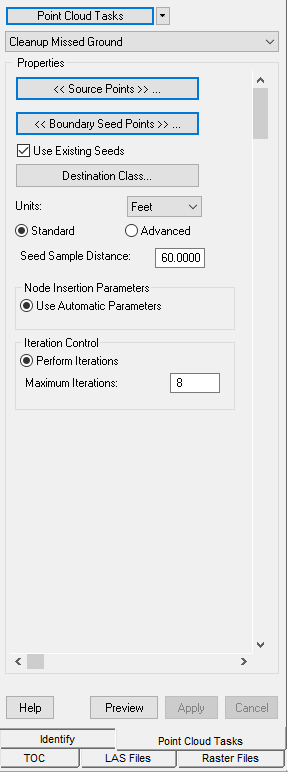 |
| Figure 2. Clean Up Missed Ground task used to fix misclassified /unclassified ground points. |
 |
| Figure 3. Both 3D and Horizontal filters used to identify areas of misclassified points |
The final section of the lab was to classify water. This done by using the Classifiy By Feature task and importing a shapefile that encompassed the water in the dataset. Once this task was run, the water points in the dataset were classified.
Results
Once the lab was completed, dataset had ground and water points classified.
Once the lab was completed, dataset had ground and water points classified.
 |
| Dataset with the classified ground and water points |
Data for this lab was provided by Dr. Cyril Wilson, University of Wisconsin-Eau Claire.