Introduction
The purpose of this lab is to analyze corridor LiDAR point clouds
and extract features. This lab also introduces reprojecting LAS files,
practical skills in utilizing terrestrial lidar scan (TLS) for corridor mapping
and assessment mapping, and extracting building footprint for LOMA (Letter of
Map Amendment) information.
Methods
Part 1: Projecting an Unprojected Point Cloud
The first section of this lab was to define the projection for a
LAS dataset for Algoma, Wisconsin. This was completed by creating a new tool
box in ArcMap that contained the Define LAS File Projection, Reproject
LAS Files, Scale LAS Files, and Shift LAS Files. Using the Define
Projection tool the Algoma LAS tiles xy projection was defined as NAD_1983_HARN_WISCRS_Kewaunee_County_Feet
(WISCRS) and the z coordinate system was defined as NAD 88 (US Feet). Once
the projection was defined for the LAS files the LAS files were then
reprojected using the same projections (figure. 1).
 |
| Figure 1. Projected LAS file in LP360 |
Once the LAS files were projected into the correct coordinate
system they were then brought into LP360 for a corridor asset inventory. To
aide in the inventory assessment, the boundary of the study area was brought
into Google Earth as a kmz file. Where different features could be
cross-checked with high-resolution imagery. Within the dataset features such as
street poles and street signs were counted, as well check power lines for
potential issues due to vegetation from surrounding trees (figure. 2).
 |
| Figure 2. 3D viewer used to determine if there was encroachment from vegetation on power lines |
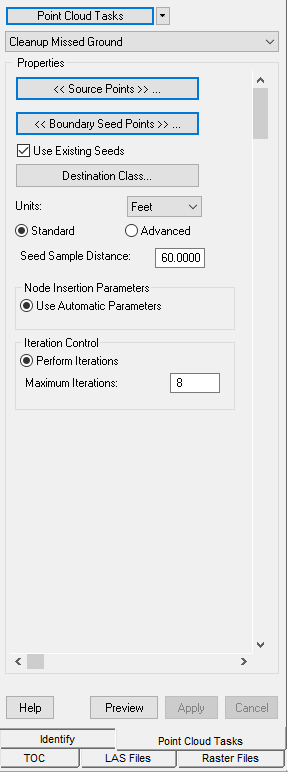
Once the dataset was checked for features, a building footprint
was extracted in LP360 from the dataset for Lab 4 in Lake County, Illinois.
Using a Point Group Tracing and Squaring task. Using this task
two shapefiles were created a building footprint and building footprint square.
The building footprint shapefile traced the outline of the classified buildings
where as the building footprint square created squared edges for the classified
buildings. Using the footprint squared image, the shapefile was conflated using
Summarize Z using building points as
the source points to determine building heights. Then the building footprint
square shapefile was conflated using the Pure
Drape conflated methods with ground points
as the source points to create a building footprint. Then to determine minimum
height for buildings to designated above the floodplain to be candidates to
apply for FEMA’s LOMA, the footprint square conflated using Summarize Z using Minimum Z with the source points being ground points. Once the building footprints where conflated, the shapefiles were brought into ArcMap (figure. 3). Then using
ArcMap building that were between 800 and 810 feet above sea level were
selected to determine which buildings could be taken off of the floodplain map
if FEMA were to hypothetically change their policy.
 |
| Figure 3. Building footprint shapefile created in LP360 and displayed ArcMap |
Results
 |
| Map created in Arcmap displaying the buildings that could be removed from floodplain map. |
Data for this lab was provided by Dr. Cyril Wilson of the University of Wisconsin-Eau Claire.